Augmented Reality Guidance for Robotic Surgery
 |
 |
| Segmented MRI image |
Rendering of the pelvis |
|

|
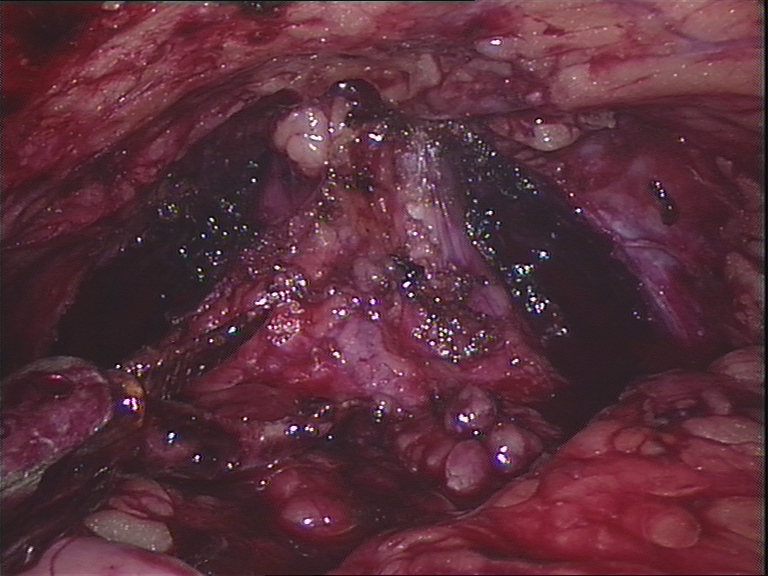
| Image through the endoscope |
Combined real and virtual images
|
Background
Image-guided surgery aims to use images taken before a procedure to
help the surgeon to navigate. In augmented reality (AR) the guidance
is provided directly on the surgeon's view of the patient by mixing of
real and virtual images (see above). Technical tasks include
calibration and tracking of devices relative to the patient,
registration (or alignment) of the preoperative model to the patient
and suitable rendering and visualisation of the preoperative data.
Project Description
This project aims to provide AR guidance for robotic surgical
removal of the prostate. The surgery is performed using the da
Vinci robot, which is controlled by the surgeon who works on a
master console. The display is in stereo, providing 3D
visualisation. Stereo AR overlays should give the impression of
virtual structures sitting beneath the surface as though the
tissue were transparent.
There are a number of technical aspects to this work that could be
examined during this project.
Calibration
The stereo da Vinci endoscope has certain properties that make
it's calibration difficult. There is significant distortion and
the baseline of the two images (distance between the two cameras)
is small. This makes for a difficult calibration for stereo
reconstruction. Work at Imperial (see Danail Stoyanov's
work on calibration) and elsewhere (see
Christian Wengert's calibration) amongst others have examined
the problem of endoscope calibration.
The purpose of this part of the project will be to examine the
accuracy of different existing calibration techniques and to
characterise the calibration parameters (including distortion) and
any variation there may be with changing focus.
This part of the project is related to the
project on camera calibration but focuses on specific issues
of endoscope calibration and 3D stereo reconstruction under these
conditions.
Patient Model Construction
To produce a model of the patient from preoperative imaging the
relevant organs need to be identified in the images. This can be a
laborious process if done manually. There are a number of
algorithms for automated or semi-automated segmentation of medical
images implemented as part of the
Insight Toolkit . This part of the project will implement
and compare different the results from techniques. A fully
automated method involving registration with a template from the
visible human will also be implemented. Various metrics will need
to be used to assess the results, including surface point distance
statistics, volume of overlap etc.
Registration
The registration from the 3D preoperative view to the stereo video
of the da Vinci robot can be achieved in a number of ways. If
corresponding features can be identified in the calibrated left
and right images then their position in 3D can be
reconstructed. This can then be aligned to the corresponding
surface from the preoperative model. Alternatively a rendering of
the preoperative model can be matched to the two view using
intensity-based metrics such as mutual information and
photoconsistency. This area of work will involve implementation
and evaluation of 2D to 3D registration optimisation from a
preoperative model to video images of the patient at various
stages of the operation.
Visualisation
Visualisation is achieved by mixing of real video and virtual
images. The intention is that the stereo overlays will enable
perception of structures sitting beneath the viewed surface as
though the tissue is transparent (i.e. x-ray eyes). However,
perception can be difficult since there are many visual cues other
than stereo. There are a number of visual parameters that can be
varied and tricks that can be employed, including varying the
mixing level, overlay of visible edges and moving textured
rendering, with the aim of achieving correct perception. This
project will look at these techniques and design experiments to
test depth perception in the lab as well as in the operating
theatre. This will involve interfacing with an external tracking
device as well as implementation of numerous graphical display
techniques to perform these experiments and hopefully achieve
accurate perception.
The details of the project can be somewhat tailored to fit around
the skills and desires of the student, who should be a highly
competent programmer and mathematician able to work as part of a
team. One of the above areas should be selected.
Eddie Edwards
Last modified: Thu Oct 18 15:02:06 BST 2007