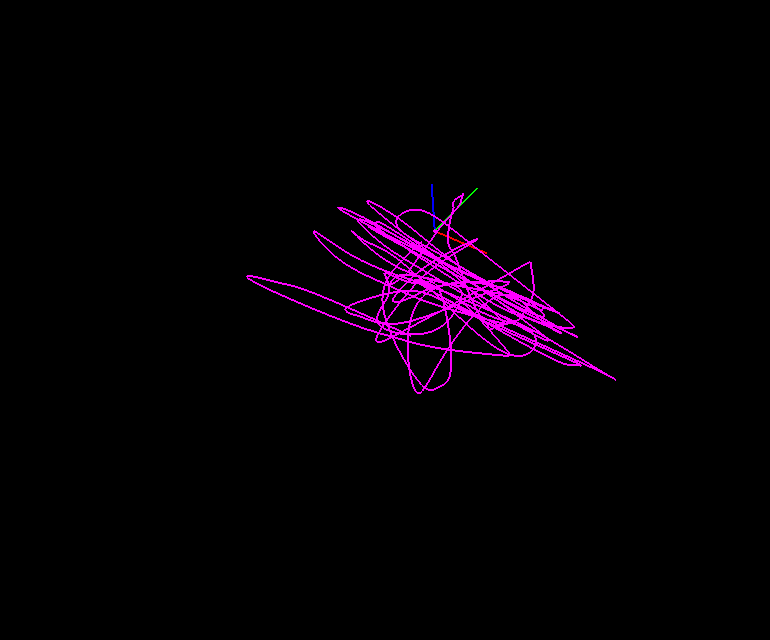
Trajectory for Variable Frame-Rate
We offer a range of different frame-rates interpolated on this trajectory to understand the implications of baseline to the 6DoF camera estimation process. Additionally the images are corrupted with camera noise to model the effects of changing shutter time (kept as half inverse of frame-rate) the lead to increased camera noise for high frame-rate images and motion blur for low frame-rate images. The trajectory has considerably rapid and shaky motion.
| Perfect Ray-Traced Images: Fast Motion |
 20Hz images[4.1GB] Ground Truth [2.1GB] |
40Hz_images[4.5GB] Ground Truth [2.1GB] |
60Hz_images[4.3GB] Ground Truth [2.2GB] |
80Hz_images[4.3GB] Ground Truth [1.7GB] |
100Hz_images[4.3GB] Ground Truth [1.7GB] |
|---|---|---|---|---|
120Hz_images[4.3GB] Ground Truth [2.1GB] |
140Hz_images[2.3GB] Ground Truth [2.1GB] |
160Hz_images[2.3GB] Ground Truth [1.6GB] |
180Hz_images[2.4GB] Ground Truth [1.5GB] |
200Hz_images[4.3GB] Ground Truth [1.7GB] |
| Photo-realistic Images (With Motion Blur And Noise): Fast Motion |
 20Hz images[32MB] Ground Truth [83MB] |
 40Hz_images[58MB] Ground Truth [166MB] |
 60Hz_images[86MB] Ground Truth [248MB] |
 80Hz_images[113MB] Ground Truth [331MB] |
 100Hz_images[139MB] Ground Truth [414MB] |
|---|---|---|---|---|
 120Hz_images[170MB] Ground Truth [497MB] |
 140Hz_images[212MB] Ground Truth [595MB] |
 160Hz_images[233MB] Ground Truth [666MB] |
 180Hz_images[259MB] Ground Truth [744MB] |
 200Hz_images[284MB] Ground Truth [829MB] |
Please see our section on Codes/Scripts for using the data. This data is represented in the native POVRay format and you would need those code snippets to parse the data.
If you find our dataset helpful, please cite our ECCV paper. @InProceedings{handa:etal:ECCV2012,
author = {A. Handa and R. A. Newcombe and A. Angeli and A. J. Davison},
title = "Real-Time Camera Tracking: When Is High Frame-Rate Best?",
booktitle = "Proc. of the European Conference on Computer Vision(ECCV)",
year = "2012",
month= "Oct.",
}
|
| Accompanied Video |
The following video gives a brief summary of the work that we carried out to understand tracking at high frame-rates and how using high frame-rates leads to robust tracking.
In this video we talk about how the scene is generated and ;
|
| Other Items Of Possible Interest |
| License |
The data is released under Creative Commons 3.0 (CC BY 3.0), see http://creativecommons.org/licenses/by/3.0/.