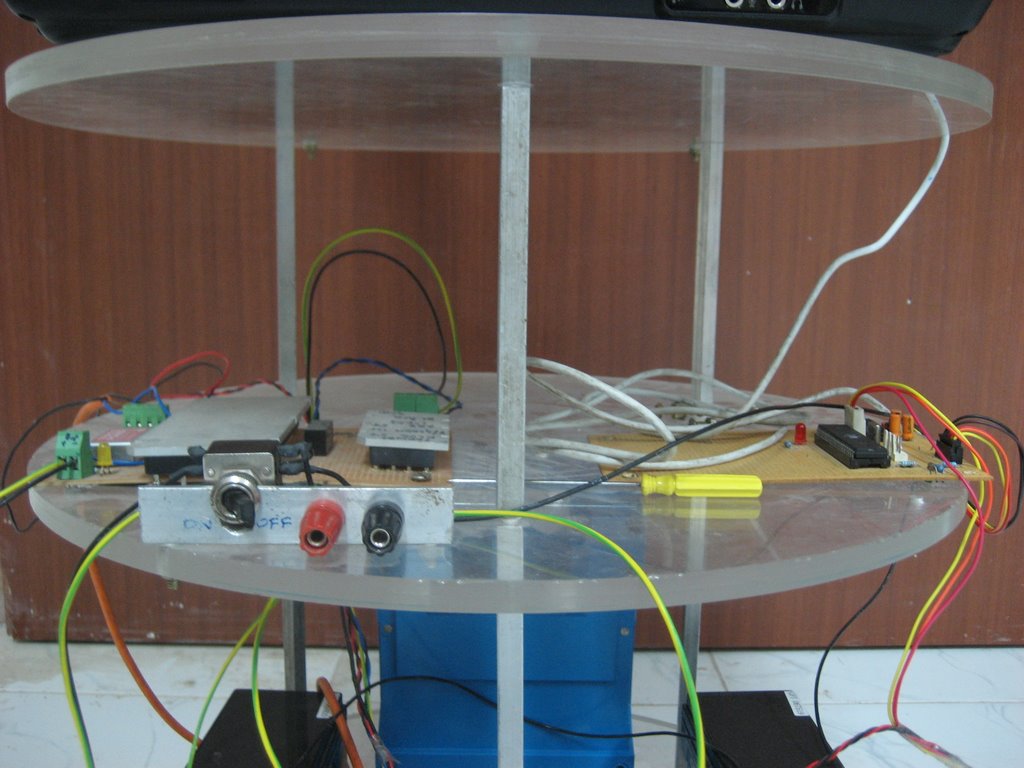
[The robot- "spawn"]
spawn archieve!
This 'Robot' was built under the guidance of Mr. Sartaj Singh , Scientist , Center for Artificial Intelligence and Robotics (CAIR), Bangalore.
Some of the Features of this robot include
1. Stereo Head ( two Logitech Cameras ) 2. Laser Range Finder 3. Precision Odometers 4. On Board Laptop
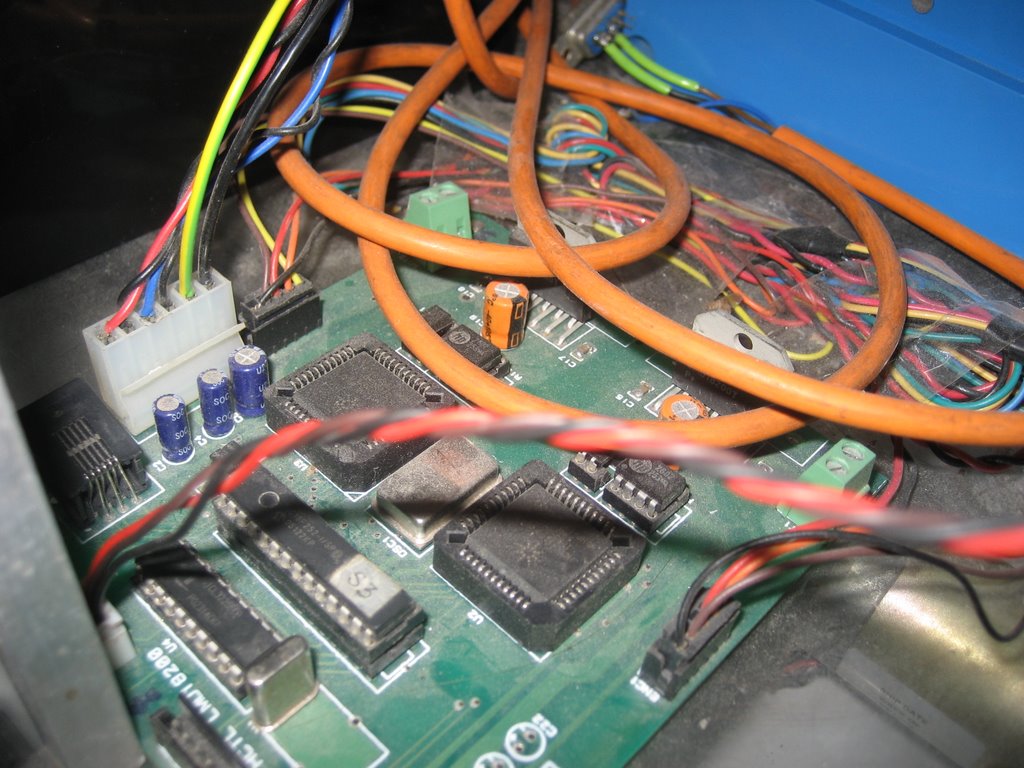
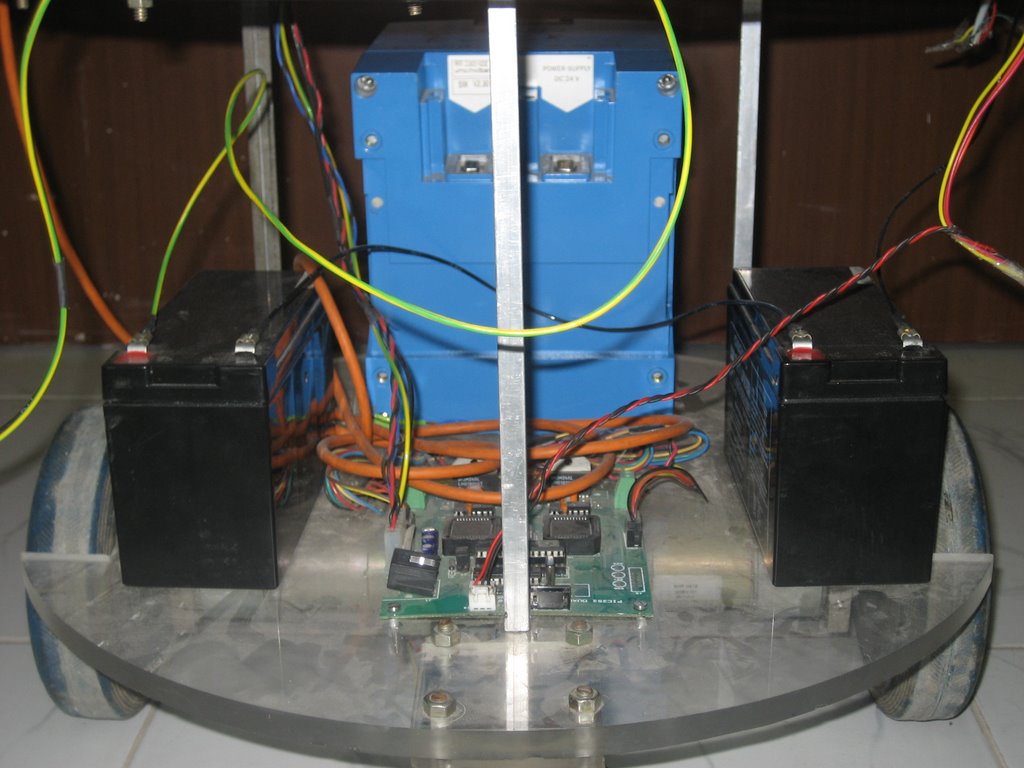
This 'Robot' is equipped with PITTMAN Motor encoders to measure the odometry accurately ,which is controlled by a PIC micro-controller 18F452 and HCTL-1100 , a motion controller IC . To establish a USB link with the laptop for the host to command the robot for translation and rotation , AVR-USB is used on ATMEL micro-controller , ATmega16. Two Lead Acid batteries each 12V together power the 'Robot'.
The translation and rotation is PID controlled .The host keeps checking the odometry of the 'Robot' continuously and commands for the rotational speed and the translation speed in proportion (PID) to the distance / rotation it has to cover from the current position to the destination.
[Object Tracking]
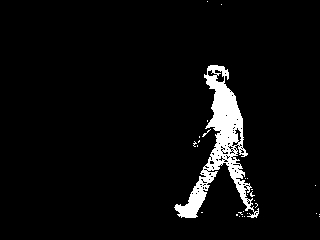
Some of the results on object tracking with a Single Camera.
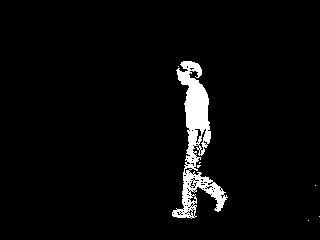
[ A probabilistic framework to extract the foreground part from the background using Mixture of Gaussians ]
[ A Three person group being tracked as a cluster ]
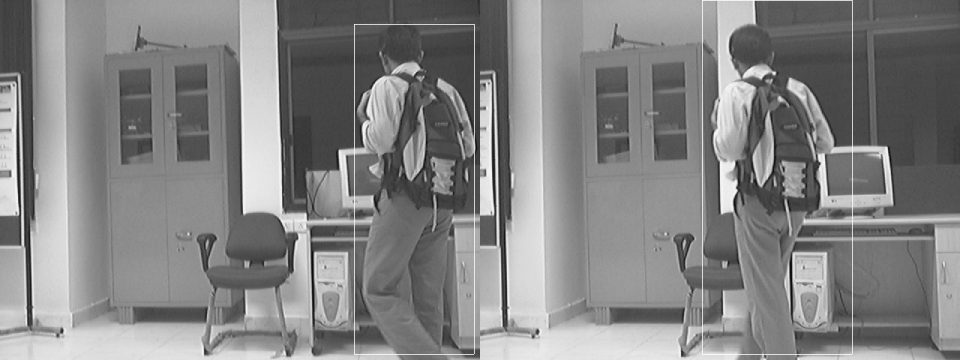
[ A person being tracked with static camera ]
[ A person being tracked on a moving camera ]
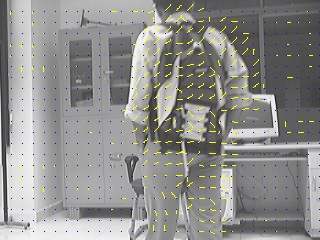
[ Results of the algorithm on the above image sequence]
[ Flow Vectors Overlaid ]
The Results of the algorithm on this Robot can be found at the following link
[Results]