Andrew Davison: Software
New Software
For up-to-date SLAM software from my research group please visit the
Dyson Robotics Lab Webpage or the older
Robot Vision Group Software Page.
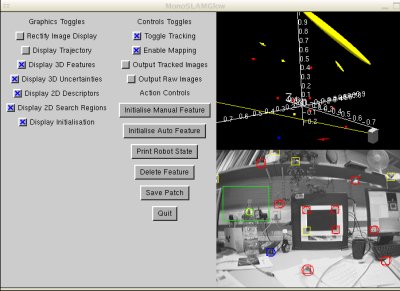
SceneLib 1.0 (May 2006) is the latest release of
my open source C++ library for real-time SLAM, and incorporates for the first time
full support for real-time MonoSLAM.
Note however that SceneLib is now unmaintained, and is tricky to compile on modern systems. As of 2012, if you are interested in MonoSLAM I would
recommend SceneLib2, written by Hanme Kim. This is a great re-implementation, with the same functionality as the original software but updated to use modern libraries and tools such as Eigen, Pangolin and CMake; and can be run either on my original file sequences or with a live USB camera.
Matlab code for monocular SLAM which was developed in collaboration
with J. M. M. Montiel and Javier Civera from
the University of Zaragoza, Spain is now available on the SLAM Summer School
2006 webpage (click on Practicals from the menu). A full practical exercise on using this software is also available and it is a good way to start learning about MonoSLAM. In particular, this implementation highlights the new inverse depth feature parameterisation.
Release 0.81 of SceneLib (released June 2001) is still available. This
version is now unsupported and relies on some out of date libraries,
so I would not advise using it as the basis for development. What it
does offer which may still be of interest are precompiled executable
simulations in several different SLAM scenarios which serve as
tutorials for those new to SLAM. These should still run on any modern
Linux system.
Andrew Davison