Model based reflex agents
Model-based reflex agents are made to deal with partial accessibility; they do this by keeping track of the part of the world it can see now. It does this by keeping an internal state that depends on what it has seen before so it holds information on the unobserved aspects of the current state.
This time out mars Lander after picking up its first sample, it stores this in the internal state of the world around it so when it come across the second same sample it passes it by and saves space for other samples.
While reading this you are keeping track of where you have got to somewhere internally in your brain just in case you lose your place.
But in order to update this internal store we need 2 things:
- Information on how the world evolves on its own.
e.g. If our mars Lander picked up the rock next to the one it was going to the world around it would carry on as normal - How the world is affected by the agents actions.
E.g. If our mars Lander took a sample under a precarious ledge it could displace a rock and it could be crushed.
We can predict how the world will react with facts like if you remove a supporting rock under a ledge the ledge will fall, such facts are called models, hence the name model-based agent.
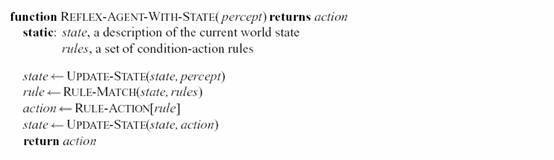
Above is a written function showing the steps a model based reflex agent goes through
In the update state section the parts of the world that the agent cannot see it put through the natural evolution algorithm, the parts that the agent can see are changed to the expected state of the world after the agents actions.
Sources:(Artificial Intelligence: A Modern Approach by Stuart Russell and Peter Novig), Reference »