 nao.motion.TrilatLocaliser
nao.motion.TrilatLocaliser
|
|||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||
java.lang.Object
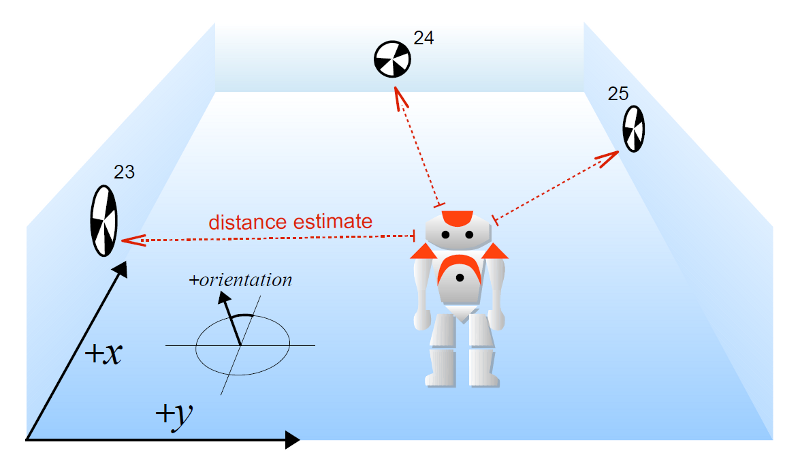
public class TrilatLocaliser
Performs 2D trilateration to find the Nao's absolute location using landmark (naomark) detection. A LandmarkMap with at least
three landmarks must be provided. Landmarks must be at the level of the Nao's front camera.
| Constructor Summary | |
|---|---|
TrilatLocaliser(ExtendedNao nao,
LandmarkMap map)
|
|
| Method Summary | |
|---|---|
static double |
estimateDistance(DetectedLandmarkInfo lm)
Estimate the distance of a spotted landmark (in metres). |
Location |
getLocation(boolean hasMoved)
Perform trilateration to calculate the robot's current position. |
double |
getOrientation()
Get the absolute orientation (heading) of the robot (in radians). |
boolean |
isAtLandmark(int id)
Determine whether the current location is close enough to a landmark. |
java.util.Map<java.lang.Integer,DetectedLandmarkInfo> |
spotLandmarks()
Look around to identify visible landmarks. |
static Location |
trilaterate(Location m1,
double distance1,
Location m2,
double distance2,
Location m3,
double distance3)
Perform the 2D trilateration calculation for 3 arbitrary locations and distances (in metres). |
| Methods inherited from class java.lang.Object |
|---|
equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait |
| Constructor Detail |
|---|
public TrilatLocaliser(ExtendedNao nao,
LandmarkMap map)
| Method Detail |
|---|
public Location getLocation(boolean hasMoved)
getLocation in interface LocaliserhasMoved - Set to true if the robot has moved since the last getLocation callpublic boolean isAtLandmark(int id)
public double getOrientation()
public java.util.Map<java.lang.Integer,DetectedLandmarkInfo> spotLandmarks()
public static Location trilaterate(Location m1,
double distance1,
Location m2,
double distance2,
Location m3,
double distance3)
public static double estimateDistance(DetectedLandmarkInfo lm)
|
|||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||